Follow the Links to:
♦ Physical Reservoir Computing-Based Mechano-Intelligence in Self-Adaptive Phononic Metastructures
♦ Tunable Topological Mechanical Metamaterials for Elastic Wave Control
♦ Adaptive Non-Reciprocal Wave Transmission via Reconfigurable Metastable Metastructures
♦ Phononic Bandgap Adaptation and Wave Steering via Origami Folding and Lattice Reconfiguration
♦ On the Dynamics of Origami Deployment
♦ Bistable Dynamics of Stacked Miura-Ori Structures
♦ Fluidic Origami: A Plant-Inspired Innovation
♦ Rotational Multistable Joints for High Speed Cobot Operations
♦ Muscle: Inspiration for a New Class of Engineered Adaptive System
♦ Earthworm-Inspired Metameric Robot Locomotion
♦ Harnessing Complex Dynamics of Mechanical-Electrical System for Energy Harvesting
♦ Efficient Uncertainty Quantification for Online Simulations of Complex Mobility Systems
Physical Reservoir Computing-Based Mechano-Intelligence in Self-Adaptive Phononic Metastructures
In recent years, the rapid advances in technologies have facilitated the development of the next generation of functional metamaterials and metastructures with build-in intelligence and autonomy. These structures must effectively adapt and respond to environmental changes by observing and processing different working conditions, making decisions, and executing actions in a highly integrated and proactive manner. Conventional sensing, controlling, and actuating platforms, built solely upon additional electronics and digital computers, are inevitably cumbersome and inefficient for achieving these intelligent behaviors. Hence, scientists have explored embedding intelligence directly into the design of mechanical structures, i.e., mechano-intelligence. While interesting, the existing efforts mainly focused on narrowly defined and limited intelligent functions. That is, there is lack of a systematic foundation for designing and integrating the various elements of mechano-intelligence, such as information perception, decision-making, and execution in complex adaptive structure systems.
On the other hand, the recent success in artificial neural networks has inspired an efficient mechanical computing paradigm known as physical reservoir computing (PRC) by harnessing the high-dimensional and nonlinear dynamics of some mechanical structures as computational resources. By training an additional linear weighted readout layer, mechanical systems can learn complex input-output mappings, resulting in versatile and multi-tasking computing capabilities, which can serve as a core component of mechano-intelligence and lay the foundation for other intelligence aspects including sensing, decision-making and execution. Mechanical metastructures, which possess high-dimensional and nonlinear dynamics, are a natural candidate for PRC, and present significant opportunities to build integrated mechano-intelligence. While promising, the current state of art is mainly limited to the scope of PRC-based mechanical computation, and not much effort has utilized such a tool to construct more integrated and multi-faceted mechano-intelligence in mechanical metastructures to advance their engineering functionalities.
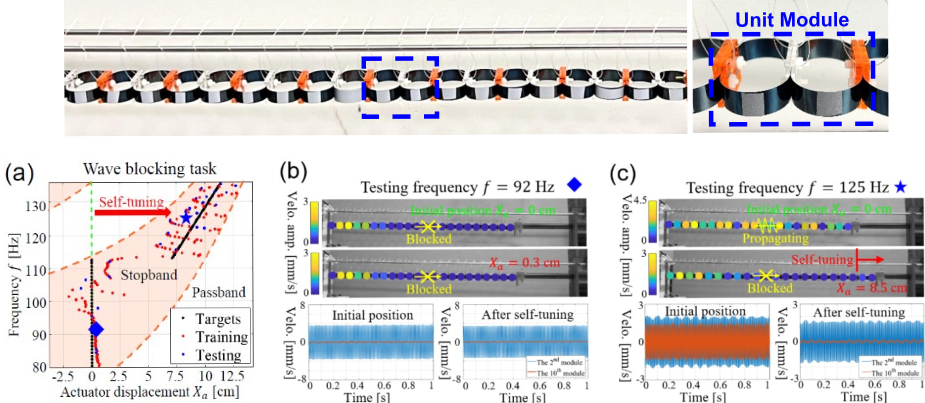
In this research, we propose to create a mechanically intelligent phononic metastructure that can efficiently and effectively access, process and respond to changing stimuli conditions for autonomous functionality adaptation by harnessing its high-dimensional wave dynamics as a physical reservoir. Specifically, we focus on the wave functionalities, one of the key features of phononic metastructures that has enabled numerous engineering functionalities, such as noise and vibration isolation, wave steering and focusing, non-reciprocal wave propagation and shock absorption. In this research, we explored a proof-of-concept testbed via a tunable one-dimensional metastructure, and showed that the proposed metastructure can perceive different input waves and make decisions on how to control its own wave characteristics. We developed an experimental prototype that physically implements a self-tuning phononic metastructure capable of recognizing different incoming wave frequencies and adaptively adjusting its wave transmission properties (e.g., to block wave propagation continuously even when the wave frequency varies). In other words, we integrated the various mechano-intelligence elements, i.e., information perception, decision-making, and execution, in the proposed metastructure reservoir framework.
Tunable Topological Mechanical Metamaterials for Elastic Wave Control
The exceptional properties of mechanical metamaterials have been harnessed by researchers to control elastic waves in mechanical structures through waveguides, which confine wave energy to a desired wave path. Recently, inspired by the development of topological insulators in condensed matter physics, investigators have studied how topological phases can be incorporated into mechanical systems. Topological mechanical metamaterials have enabled the achievement of quasi-lossless (i.e., immune to undesirable backscattering) transportation of elastic energy along waveguides with sharp bends and structural imperfections (e.g., wear or manufacturing defects). However, most topological mechanical metamaterials developed to date are fixed after fabrication and thus do not possess any adaptive capabilities, limiting their potential applications and degrading performance when subjected to unpredictable external conditions. To address this gap, the goal of this research is to develop and explore tunable topological mechanical metamaterials that achieve on-demand control over the flow of elastic waves in mechanical structures.
The two primary approaches used to achieve on-line adaptivity in this research are piezoelectric circuitry and metastability (metastability indicates a coexistence of metastable states under a constant global topology, which are combinations of internal configurations/states that possess unique properties). Adaptation of local properties is achieved by tuning resonant piezoelectric circuitry (e.g., continuous tuning of an inductance) or switching between coexisting metastable states (e.g., discrete transition between two stable states). Methodologies are developed to enable on-line tailoring of the frequency and spatial direction of localized elastic waves in 2D and 3D topological mechanical systems. The research outcomes associated with this project may offer new insights into how topology can be used for programmable control over the flow of elastic energy in mechanical structures.
Adaptive Non-Reciprocal Wave Transmission via Reconfigurable Metastable Metastructures
Asymmetric and non-reciprocal wave transmissions have been demonstrated with great promise in applications such as ultrasonic imaging, sonars, noise absorbing devices, and impact and blast protection. For engineered structures/materials, the wave features are intricately related to the underlying architecture. This indicates that changes in topology, symmetry, and component composition could drastically alter the wave propagation characteristics. Therefore, adaptive structures/materials capable of on-demand reconfiguration presents the exciting potential to uncover new wave transmission features, and elevate nonconventional wave control to a new level in that such adaptivity would open new doors for systems to respond to environmental changes, maximize performance, enhance safety, and optimize operation. However, the opportunities to selectively leverage the breadth of exceptional unconventional wave transmission characteristics in an on-demand or tunable manner are not well understood and insufficiently elucidated.

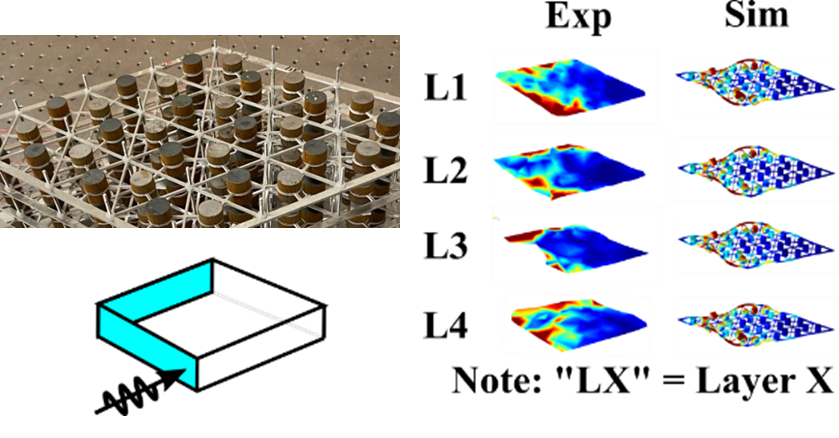
Therefore, in this research, we aim to create new foundations for reconfigurable structures invested with massively adaptive, asymmetric elastic wave propagation properties by building upon concepts of non-reciprocal wave transmissions integrated with our recent breakthroughs in nonlinear metastable modular structures. Metastability indicates a coexistence of metastable states, which are combinations of internal configurations/states that possess unique properties. Thus, transitions among coexisting metastable states yields a fundamental adaptation of properties, providing means for bandgap tuning in the context of wave transmission. Overall, we will facilitate non-reciprocal wave propagations by exploiting the metastable modular architecture through the nonlinearity and asymmetry of strategically configured constituents, and achieve adaptive wave motion via metastable state control through switching the internal configurations. An example metastable module containing a bistable constituent connected with a mono-stable elastic element and a multi-module assembly are illustrated in Figure. By assembling these modules in an asymmetric manner and strategically switching amongst the metastable states, one could realize significant spatial asymmetry and mechanical property changes, which will in turn enable non-reciprocal wave propagation and its on-demand adaptivity.
Phononic Bandgap Adaptation and Wave Steering via Origami Folding and Lattice Reconfiguration
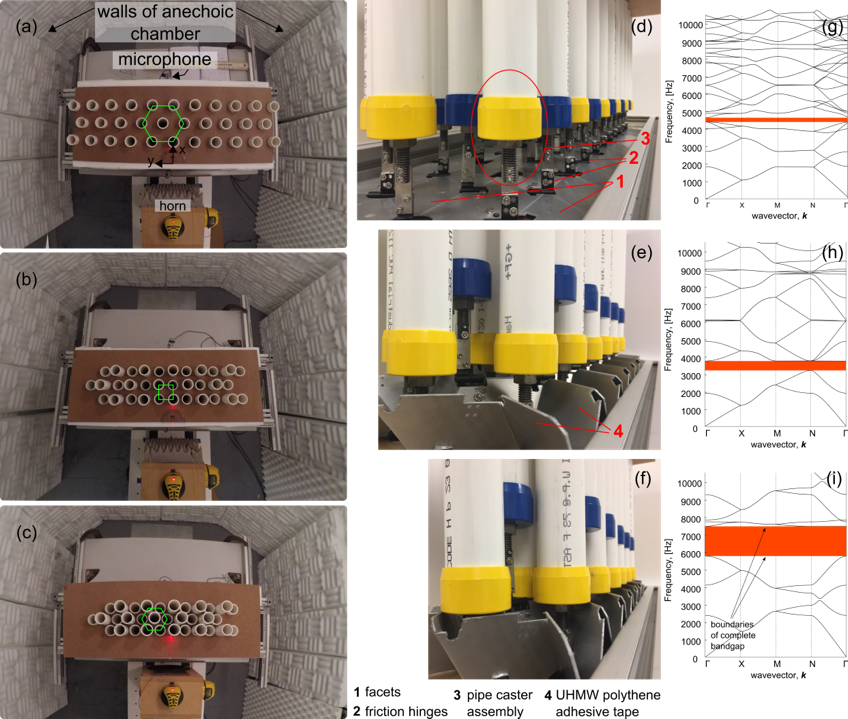
We introduce a framework of utilizing origami folding to redistribute the inclusions of a phononic structure to achieve significant bandgap adaptation and wave steering. Cylindrical inclusions are attached to the vertices of Miura-Ori sheet, whose one degree-of-freedom rigid-folding can enable fundamental reconfigurations in the underlying periodic architecture via switching between different Bravais lattice‑types. Such reconfiguration can drastically change the wave propagation behavior in terms of bandgap and can be utilized to design adaptive sonic barriers for effective noise control (see video). It can also be harnessed to produce steerable collimated beams in air by coupling the origami phononic structure with adjustable metamaterial inclusions, where it controls the Dirac points in a broad range, and thus achieve collimated beams with on-demand tunable frequency and angle. These advancements provide a simple, cost-effective alternative to acoustic phased arrays, greatly expanding the potential of acoustic sensing.
On the Dynamics of Origami Deployment
The ability of origami designs to be folded compactly into small volumes and deployed to large 3-D structures has led to a number of deployable system applications. These range from micro-scale biomedical devices to large structures constructed for aerospace and architecture applications. Despite the advancement in origami mechanism design, the focus is still primarily on its static/quasi-static characteristics. To date, the system dynamics during origami deployment have not been well-studied or understood. To advance the state of art, the goal of this research is to investigate the dynamic characteristics of the origami deployment process and build a rigorous and comprehensive framework for exploring the origami’s dynamic behaviors. In this research, two types of structures are investigated, namely a Miura-ori sheet and a Kresling origami tube.
The research with Miura-ori sheet investigates the effect of different parameters of origami crease patterns on their deployment dynamics. In this study, we construct a dynamic model of a Miura origami sheet based on the bar-and-hinge approach, capturing panel flexibility and inertial effects. Deployment is facilitated by strain energy stored in the hinged creases, and a controlled deployment velocity at one end of the Miura sheet. We analyze the deployment process of integrated Miura sheets with various parameters. This investigation provides a foundation for the understanding of the dynamic characteristics of origami deployment and paves the way for new applications of origami-based deployable structures.
The Kresling pattern, which arises from the twist buckling of a thin cylinder and can exhibit multistability, offers great potential. These Kresling origami deployment dynamics may be complex due to the strong nonlinearity, bistability, and potential for off-axis motions. Hence, this research seeks to uncover the rich mechanical properties and dynamics of Kresling structures for a range of system geometries and corresponding deployment strategies. It employs a full, six-degree-of-freedom model to provide insight into both axial and off-axis dynamics, revealing that the variation of key geometric parameters may lead to regions with qualitatively distinct responses. Through a systematic study of energy landscapes, transient dynamics, and off-axis motions, this investigation offers new insight to the potential for Kresling origami as a platform to develop deployable systems. Overall, the research outcomes suggest the strong potential of Kresling-based designs for deployable systems with robust and tunable performance.
Bistable Dynamics of Stacked Miura-Ori Structures
Origami-inspired structures and materials have shown extraordinary properties and performances originating from the intricate geometries of folding. However, current state of the art studies have mostly focused on static and quasistatic characteristics. This research performs a comprehensive experimental and analytical study on the dynamics of origami folding through investigating a stacked Miura-Ori (SMO) structure with intrinsic bistability. We fabricate and experimentally investigated a bistable SMO prototype with rigid facets and flexible crease lines. Under harmonic base excitation, the SMO exhibits both intrawell and interwell oscillations. Spectrum analyses reveal that the dominant nonlinearities of SMO are quadratic and cubic, which generate rich dynamics including subharmonic and chaotic oscillations. The identified nonlinearities indicate that a third-order polynomial can be employed to approximate the measured force-displacement relationship. Such an approximation is validated via numerical study by qualitatively reproducing the phenomena observed in the experiments. The dynamic characteristics of the bistable SMO resemble those of a Helmholtz-Duffing oscillator (HDO); this suggests the possibility of applying the established tools and insights of HDO to predict origami dynamics.We also show that the bistability of SMO can be programmed within a large design space via tailoring the crease stiffness and initial stress-free configurations. The results of this research offer a wealth of fundamental insights into the dynamics of origami folding, and provide a solid foundation for developing foldable and deployable structures and materials with embedded dynamic functionalities.
Fluidic Origami: A Plant-Inspired Innovation
The impulsive and recoverable movements in plants like the Venus flytrap have inspired scientists and engineers for more than a century.Even though the associated actuation mechanisms and physiological features of these movements have been relatively well studied, there have not been significant efforts to holistically apply the lessons from the plant kingdom to engineered multifunctional materials and structural systems. By combining the plant movement principles and paper folding topology, a novel adaptive structure concept called fluidic origami was invented in this research project. The idea is to combine different Miura-Ori sheets along their crease lines to form a three dimensional topology, which has naturally embedded tubular cells. Filling these cells with working fluid, one can strategically control their internal pressures and volumes to achieve multiple adaptive functions concurrently.
For example, fluidic origami can achieve distributed shape morphing according to the origami folding trajectory by actively changing the internal fluid volume (e.g. via pumping). Fluidic origami can also significantly tailor its stiffness properties by constraining the internal fluid volume via simple on-off valve control. In addition, fluidic origami structure is multi-stable, and the existence and shape of these stable configurations can be controlled by the fluid pressure. The performances of these unique adaptive functions are based on scale-independent geometric principles, and it’s highly programmable by tailoring the origami crease pattern.
Building upon these ideas, an integration of fluidic origami cells could lead to novel adaptive structures capable of distributed and rapid shape change based on the similar physical principles as the plant movements. Therefore, fluidic origami can have great potentials in various applications like high-performance morphing aircraft, kinetic architectures, and impulsive actuators.
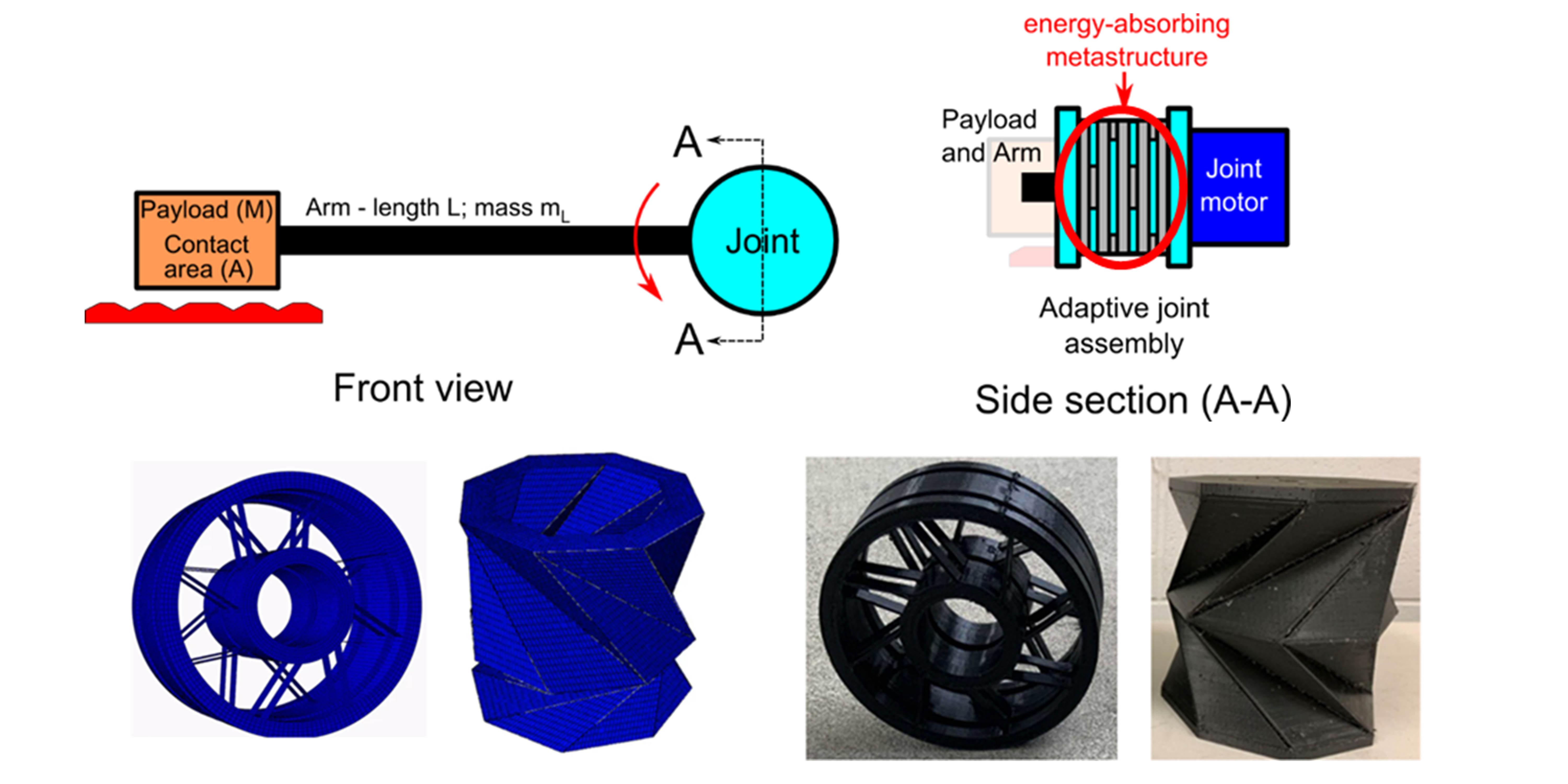
Rotational Multistable Joints for High Speed Cobot Operations
Force and power limited cobots (collaborative robots), in theory, allow humans to interact and work in close proximity with robots. However, in the event that a robot contacts a human, safety concerns and ISO standards limit the maximum amount of pressure the robot may induce on the human. A cobot must physically contact a human to detect a collision and bring its motors to a stop. Therefore, the maximal angular velocity of its joints given the robot physics and payload is directly limited to satisfy ISO standards. In manufacturing environments, robots that meet ISO standards are typically too slow to meet cycle times. To overcome this limitation, safe zones around cobots allow quicker operation when humans are not present and collaborative operation when humans are present, but this requires an increased robot footprint over a true collaborative unit. To address these challenges, this research explores modifications to cobot hardware employing novel multistable metastructure concepts that allow us to achieve the desired cycle times and footprint while ensuring compliance with ISO standards. While multistable metastructures have been explored for translational operations, they have yet to be designed or utilized in rotational motions. Two ideas are explored in this investigation. One is to create a multistable rotational joint by constraining pre-buckled bistable beams within a pair of concentric rings of the joint – these bistable elements will snap through and absorb energy under impact torque loading. The other idea is to design an origami-inspired rotational element via a coupled Kresling modular design (CKMD). In this design, two Kresling origami modules with opposite chirality are integrated, achieving pure rotational motion between two ends of polygon surfaces. Results show that the CKMD can be tailored by strategic selection of the initial height ratio, which alters the energy landscapes of both Kresling modules and leads to qualitatively distinct responses and energy absorption features. Both these concepts are novel, show excellent potential to advance cobot design and controls.
Muscle: Inspiration for a New Class of Engineered Adaptive System
Skeletal muscle possesses several features – such as properties adaptability, multi-functionality, robustness, and versatility – that are attractive for a broad range of scientific and engineering applications. Much of the engineering research focus to date has been on emulating the whole-muscle characteristics, leading to advanced concepts for actuation and locomotion mechanisms, but there has been a scarcity of investigations that take inspiration from the synergistic assembly of skeletal muscle’s microscale and nanoscale active and passive mechanical constituents. This research aims to develop new adaptive engineered systems by exploiting a more complete understanding of the micro- and macroscale mechanical constituents and compositions of muscle.
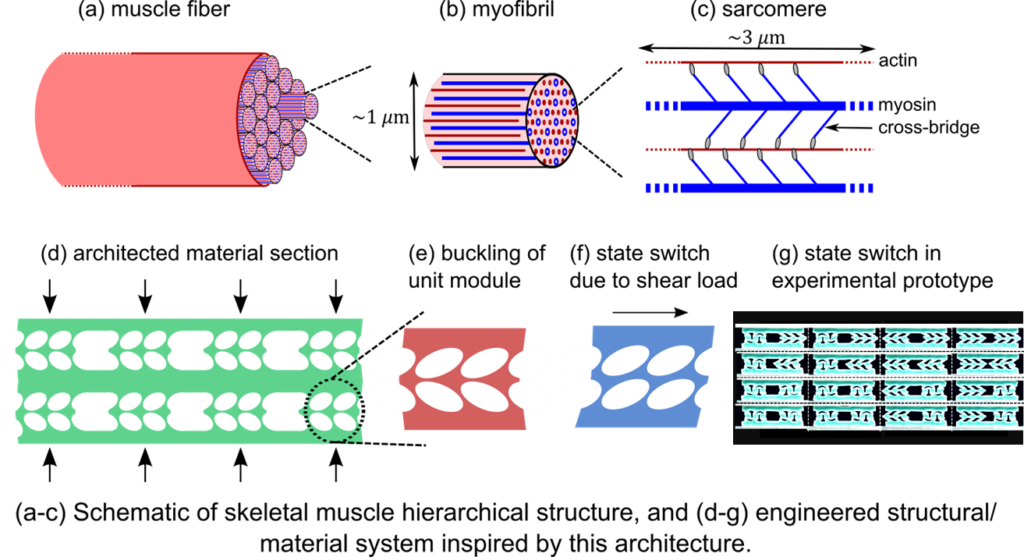
The research objectives include developing an understanding of one-dimensional mechanical modules designed to emulate muscle’s nanoscale cross-bridge constituent, and exploiting modularity to assemble these modules into larger systems, similar to the assembly of muscle cross-bridges into sarcomere contractile units. Investigations inspired by the asymmetric potential energy landscape of cross-bridges, and by their remarkable ability to effectively store and release energy to enable sudden motions and reduce the energetic cost of periodic motions have shown that mechanical systems may be strategically designed to exhibit similar characteristics, and incorporation of these behaviors into multi-dimensional structural and material systems enhances opportunities for properties adaptation and energy capture and release. The results of this research are expected to foster the development of new structural and material systems exhibiting multi-functionality, properties adaptability, and improved energy dissipation and recovery.
Earthworm-Inspired Metameric Robot Locomotion
Earthworms possess flexible body and strong locomotion capability in various environments, which have inspired researchers and engineers to develop earthworm-like robots. It is revealed that the metameric segmentation, the antagonistic muscle layout, and the setae are three important morphology features for the earthworm to perform effective locomotion, and the retrograde peristalsis wave is the key locomotion mechanism that the earthworm takes. Much of the research to date has been on the design of segmented robots, with major focus on the actuation mechanisms. However, there has been a scarcity of efforts that are devoted to the understanding and utilization of the earthworms’ locomotion mechanisms. As a result, this research project aims to develop control methods for generic metameric locomotion robots by exploiting the correlations among robot segment coordination and locomotion performance, and the earthworm’s peristaltic waves.
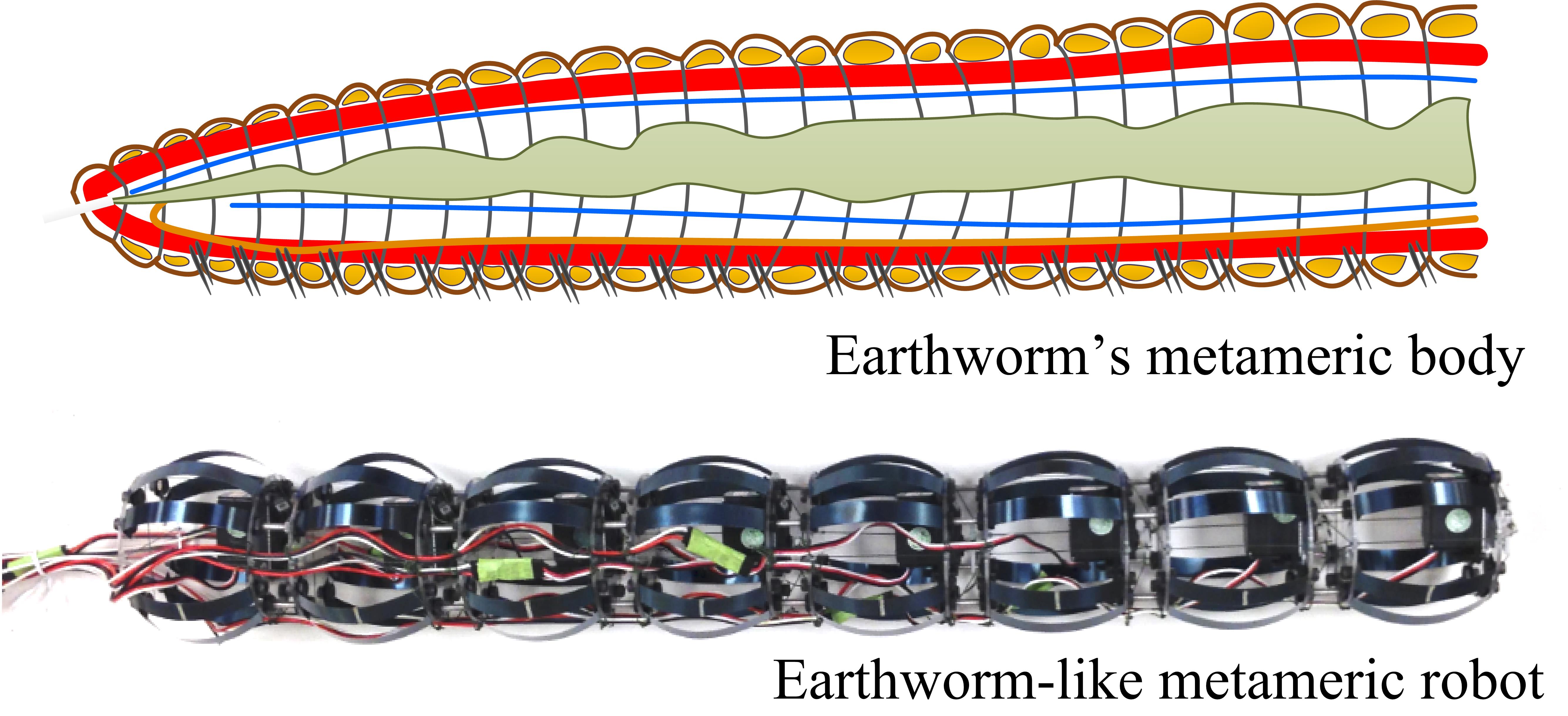
Building upon the metameric feature of the earthworm-like robot, generic mechanical models of the metameric robot are built. Two methods are developed to control the robot segments for effective locomotion. From a bio-inspiration perspective, a generic gait generation algorithm is proposed by mimicking the earthworm’s basic locomotion mechanism. From a robotics perspective, the robot segment actuations are coordinated by making use of their symmetry relationship. These two approaches, although are significantly different, converges toward the same finding that the peristalsis wave is an inherent mechanism of earthworm-like locomotion and can be adopted to effectively control the metameric robot locomotion. The concept of metameric architecture as well as the proposed control methods will advance the state of the art of the design and control of crawling robots.
Harnessing Complex Dynamics of Mechanical-Electrical System for Energy Harvesting
While vibration energy harvesting is becoming more feasible, recent research outcomes show that it is critical that basic research issues be addressed before a high performance, high efficiency energy harvesting system can be realized for myriad applications. Vibration energy harvesting devices are generally a combination of electromechanical platform (e.g. piezoelectric beam) converting vibration energy to electrical power, and electrical impedance to which the platform is coupled (e.g. rectifying circuit) for energy capture and/or utilization. The state-of-the-art formulations of these devices exploit the nonlinearities in dynamics of either mechanical side (with unrealistic linear circuits) or electrical side (with simple linear mechanical devices) to enhance energy capture compared to linear devices, but do not exploit them in an integrated manner.
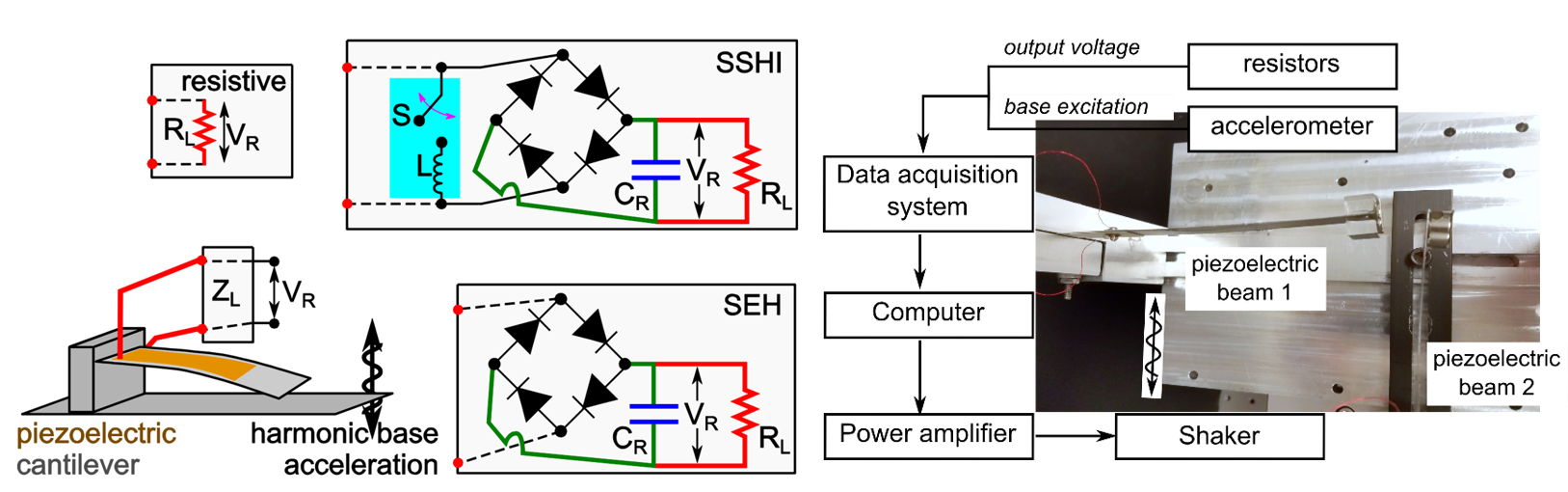
This research aims to maximize the energy capture by formulating an integrated approach to leverage complex dynamics of nonlinear electromechanical platform and realistic nonlinear rectifying electrical circuitry. This research will create accurate, predictive analytical formulations for nonlinear, non-smooth, and multimodal dynamic systems. This will facilitate rich insight into their ideal integration and guide design for energy harvesting systems that yield high and robust energy capture performance. Experimental studies will validate the analytical findings and will investigate new piezoelectric energy harvesting systems identified by the theory that set electrical energy-capture benchmarks. The results of this research will guide development of energy harvesting systems that empower future generations of self-sufficient microelectronics, such as the prolific wireless structural health monitoring sensor networks that are otherwise reliant on unsustainable energy resources.
Efficient Uncertainty Quantification for Online Simulations of Complex Mobility Systems
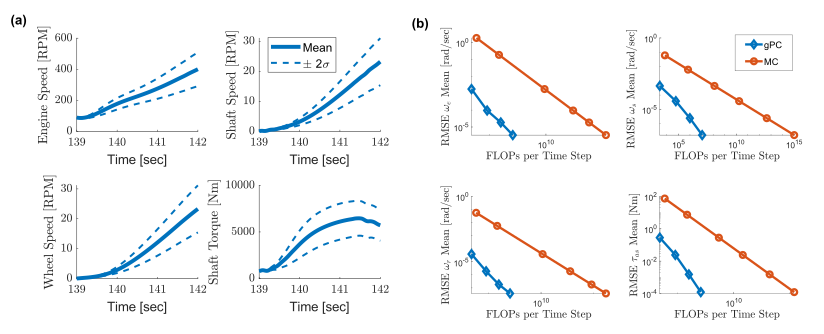
Online simulations conducted in a vehicle is essential for enabling predictive control of mobility systems. These online simulations must accurately represent the behavior of the physical system while accounting for various uncertainties. For example, modeling errors are unavoidable, thus introducing model parametric uncertainty; inputs from the driver and driving environment are subject to uncertainty and generally unknown a priori. The existence of the uncertainties renders the simulations stochastic. For complicated mobility systems that exhibit nonlinearities, it is extremely challenging to conduct stochastic simulations for predictive control purposes using the limited computing resources available in a vehicle.
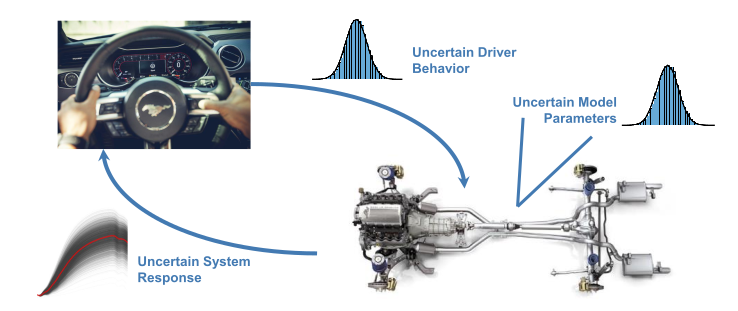
In this research, we seek to alleviate these computational bottlenecks by utilizing generalized Polynomial Chaos (gPC) to efficiently propagate and quantify uncertainties without loss of accuracy for online simulations of mobility systems. To demonstrate the effectiveness of this method, uncertainty quantification is performed for simulations of vehicle launch where both model and input uncertainties are considered. We use a standard Monte Carlo (MC) estimator as a baseline as comparison to show the computational efficiency advantage of the gPC. As the results indicate, for the same accuracy, the proposed gPC-based method is orders of magnitude faster than a standard MC estimator. The outcome of this research suggests that the proposed gPC-based method is well-suited to many applications that require fast and accurate online stochastic simulation capabilities and can be extended to other complex systems sharing similar characteristics.